Autonomous Restaurant Service Robot for Food Delivery to Customers

Components:
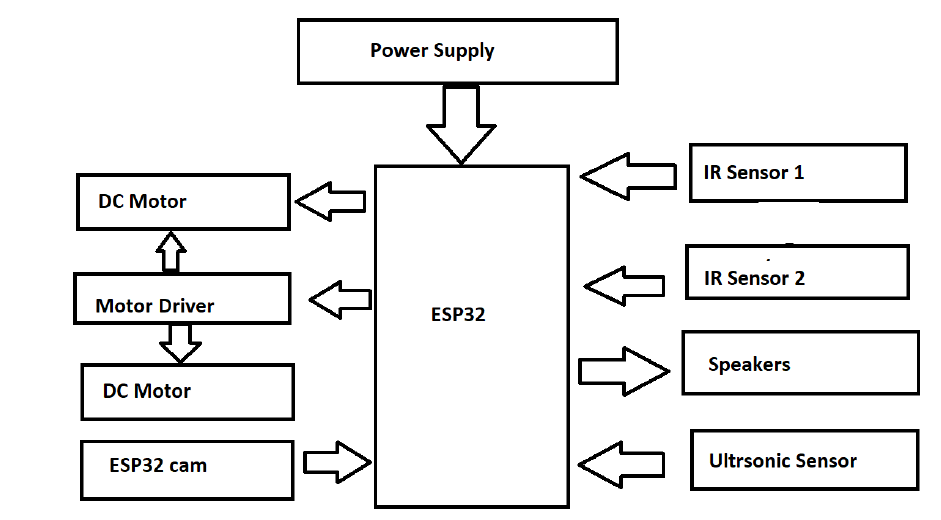
Hardware Components:
- ESP32
- IR Sensors
- Ultrasonic Sensors
- DC Geared Motors
Software Used:
- Arduino IDE
- Embedded C / C++
Project Description:
To build a simple and efficient autonomous robot that delivers food from the kitchen to customer tables in a restaurant using basic sensors, omni-directional wheels for smooth movement, and button-based input for destination selection.The robot follows a predefined black line path using infrared (IR) sensors. It uses ultrasonic sensors to detect obstacles such as people or chairs and pauses until the path is clear. The kitchen staff presses a button to choose the table number, and the robot starts its journey. On reaching the destination (based on distance or line junction counting), the robot alerts the customer using a buzzer or LED. After the customer picks up the food, it returns to the starting point automatically.This simplified restaurant service robot offers a reliable and low-cost solution for automated food delivery within restaurants. With basic sensors and omni-wheels, it ensures safe and smooth movement, improving both service efficiency and customer satisfaction. It's a great starting point for future restaurant automation.
Accelerate innovation with world-class tech teams We’ll match you to an entire remote team of incredible freelance talent.