View Project
Smart Railway Anti-Collision System with Auto Track Change and Obstruction Sensing for Accident Prevention

Components:
Components Used:
Hardware:
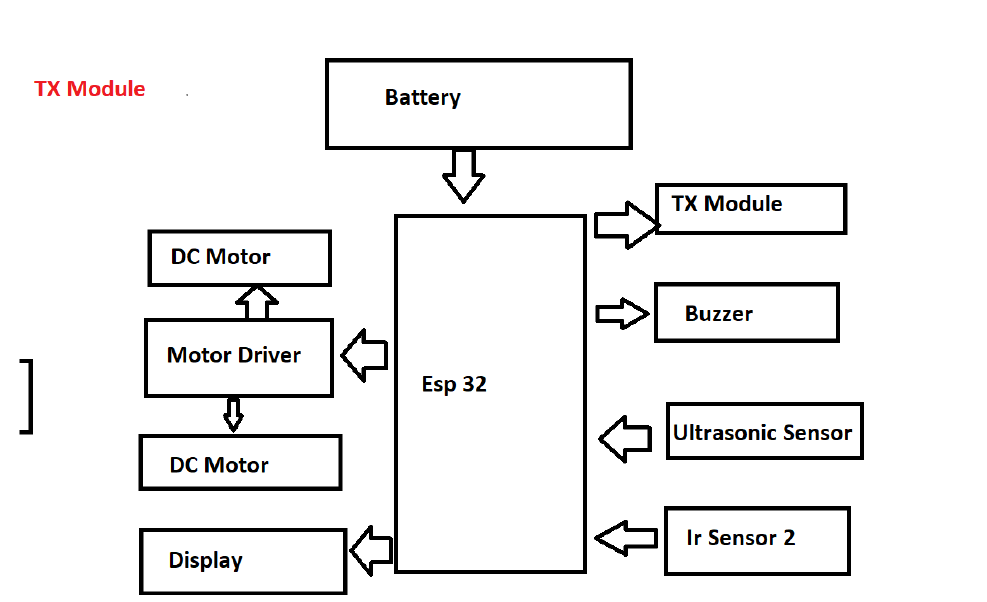
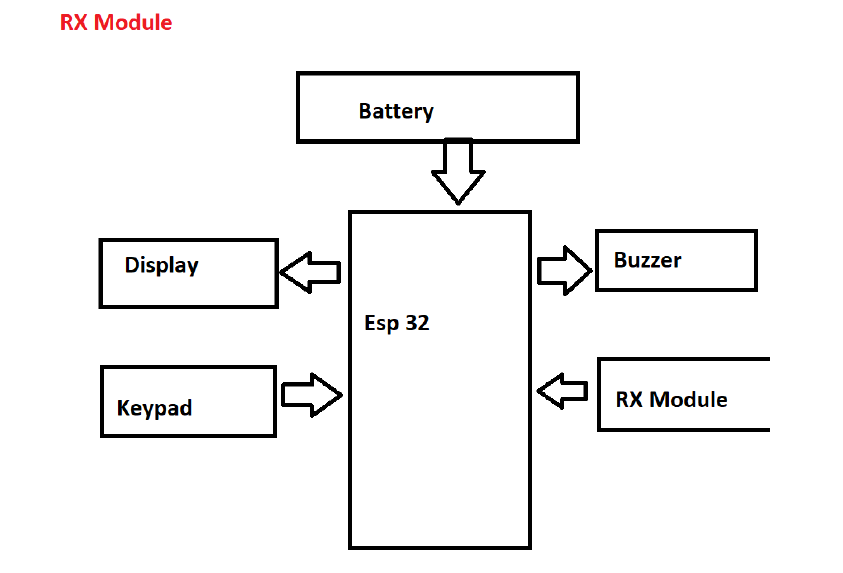
- ESP32 – Main controller
- Ultrasonic and IR Sensors – For obstacle and train detection
- RF Module (NRF24L01 / RF433) – For wireless communication
- Servo Motor To control the track changer
- Motor Driver (L298N) – For train and servo motor control
- Buzzer / LED – For warning alerts
- Battery Pack / Adapter – To power the system
- DC Motor
Software:
- Arduino IDE – To write and upload the code
- Embedded C / C++ – Programming language for logic
Project Description:
The main aim of this project is to build a smart railway safety system that prevents train colli-sions by detecting obstacles or other trains on the track and automatically switching the train to a safe track.This system uses sensors placed on the train and track to detect any obstacle or another train ahead. If a threat is detected, the system sends a signal to stop the train or change its track using a motorized track switch. A microcontroller like Arduino or ESP32 is used to read the sensor data and control the motor or servo responsible for switching the tracks. For communication between two trains, RF modules can be used. The system works in real time and takes action before any collision happens.This project offers a smart and practical approach to prevent railway accidents. By detecting threats early and responding by changing tracks or stopping the train, it can save lives and reduce damage. It is a reliable and scalable system that, with further development, can be used in real-world railway networks
Accelerate innovation with world-class tech teams We’ll match you to an entire remote team of incredible freelance talent.