View Project
Autonomous Robotic System for Manhole Cap Removal and Internal Cleaning with Live Monitoring

Components:
Hardware Components:
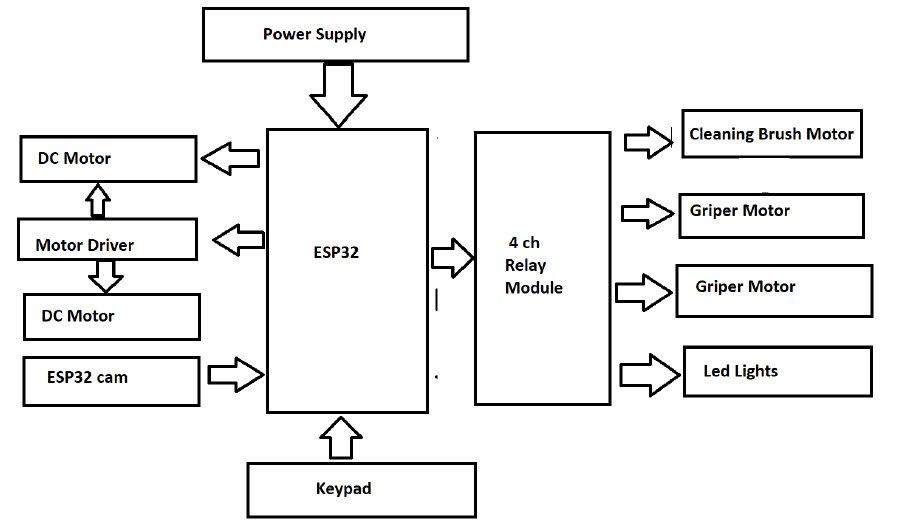
- ESP32
- High Torque DC Motor
- Robotic Arm with Gripper
- ESP32-CAM
- Rotating Cleaning Brush
- DC Motors with Tracks or Wheels
- Battery Pack (12V/24V Li-ion)
- LED Lights
Software Components:
- Arduino IDE
- Web/App Interface
- Embedded C
Project Description:
To design and build an autonomous robotic system capable of removing manhole covers, performing internal cleaning operations, and providing live video monitoring to ensure safety, hygiene, and efficiency in underground maintenance tasks.The system includes a robotic arm with a mechanical gripper to lift and remove the manhole cap. After removal, a camera-equipped robot is lowered into the manhole to inspect and clean the interior using a rotating brush or water jet. Sensors help detect the depth and obstacles inside. The entire operation is controlled autonomously or manually via a remote, and the live video feed is streamed to a mobile or PC using Wi-Fi or RF technology.This autonomous robotic system provides a safe, effective, and modern solution for manhole maintenance. By automating tasks like cap removal, internal inspection, and cleaning, it significantly reduces human risk and increases efficiency. With further upgrades, this system can play a vital role in smart city sanitation and maintenance management.
Accelerate innovation with world-class tech teams We’ll match you to an entire remote team of incredible freelance talent.