View Project
Wireless Remote-Controlled Bomb Detection and Defusing Robot with NRF Module, Wi-Fi Camera, and Real-Time Monitoring

Components:
Hardware Components:
- Arduino Uno/Nano – Main controller
- NRF24L01 Wireless Module (2 units) – For remote control communication
- ESP32-CAM – For live video streaming
- L298N Motor Driver – To control robot motors
- Geared DC Motors with Wheels s – For movement
- Robotic Arm – To defuse or lift the bomb
- Ultrasonic Sensor – For obstacle detection
- Smoke/Gas Sensor – To detect explosive gases
- Battery Pack (12V or 7.4V Li-ion) – To power the robot
- Chassis and Body Frame – Holds all components
Software Used:
- Arduino IDE – For coding the robot
- Web browser or mobile app – To view camera footage
Project Description:
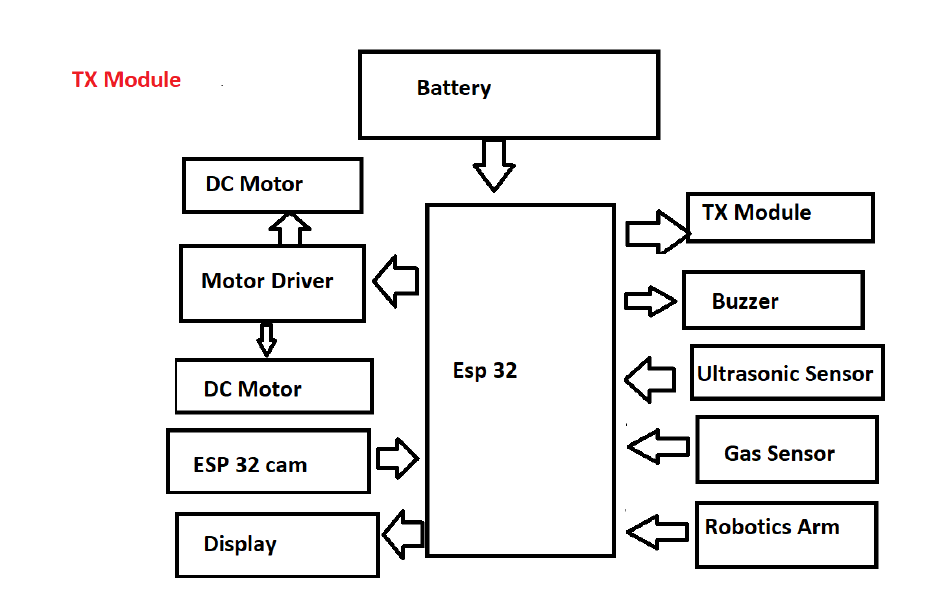
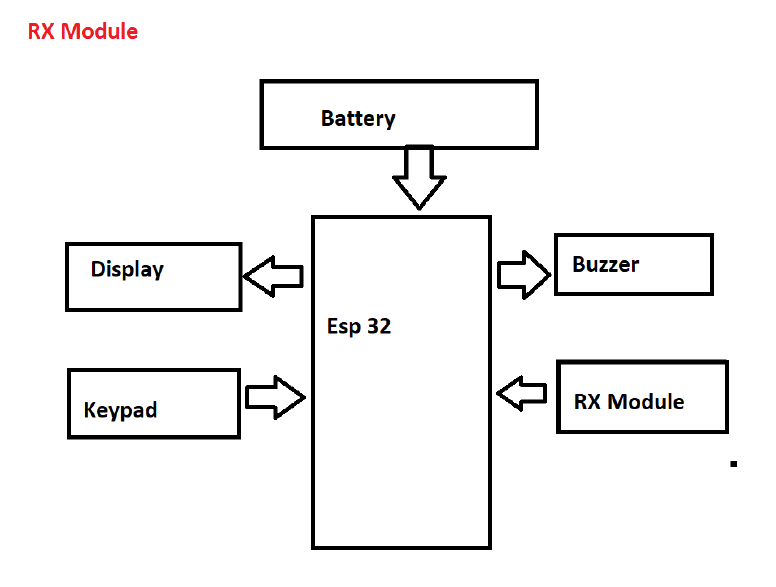
The aim of this project is to develop a wireless robot that can detect and defuse bombs from a safe distance. It uses a Wi-Fi camera for live monitoring and an NRF module for wireless remote control.The robot is controlled through a remote using the NRF24L01 wireless module. A controller sends movement commands to the robot. A Wi-Fi camera mounted on the robot streams live video to a phone or laptop, helping the operator navigate and inspect objects. The robot also has a small robotic arm or tool to handle and defuse suspected bombs safely. All operations are done remotely, keeping the human operator out of danger.This robot is a rugged, multi-terrain vehicle equipped with a wireless control interface, NRF24L01 long-range transceiver, Wi-Fi-enabled camera system, and a manipulator arm for safely interacting with suspicious objects. The platform combines real-time telemetry, low-latency video streaming, and precision control, allowing operators to assess threats from a secure distance.Designed with modular components, the robot supports additional sensors and tools to adapt to various bomb disposal scenarios while minimizing human exposure to danger.
Accelerate innovation with world-class tech teams We’ll match you to an entire remote team of incredible freelance talent.